Soft Robotics
Soft Robotics
Soft robotics focused on building robots made from flexible, soft materials that can safely interact with humans and navigate complex environments. Unlike traditional rigid robots, soft robots can adapt to their shape and stiffness, making them ideal for tasks like medical procedures, inspecting hard-to-reach areas and even search and rescue operations. Our research focused three area of the soft robots those are magnetic soft robots, jamming mechanism to enable variable stiffness for soft robots and continuum soft robots.
Ongoing Projects
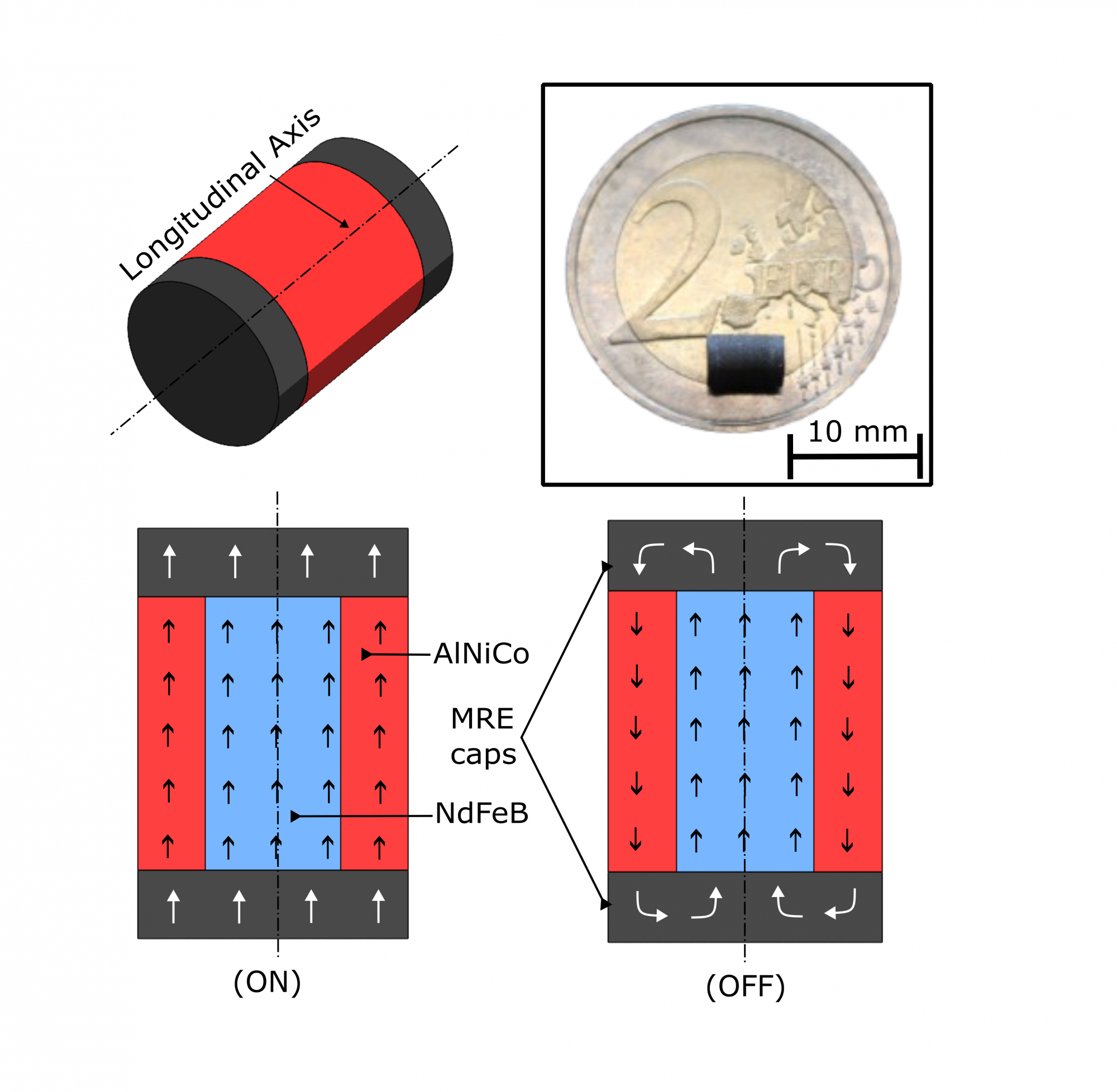 |
Magnetic Soft RobotsMagnetic soft robots, which embed magnetic particles in a compliant matrix like an elastomer, are ideal for medical in-vivo applications due to their wireless control via external magnetic fields. While this control is often limited to steering, our research group expands this to include untethered, low-energy actuation by using at least two magnetic materials with different coercivity values. This coercivity difference allows us to selectively reverse the magnetization of the 'semi-hard' magnet with an external pulse without affecting the 'hard' magnet. We apply this principle in projects like Soft Reprogrammable Permanent Magnets (srPMs), which can be toggled 'on' (acting as a permanent magnet) or 'off' (behaving like passive iron) for use in millimeter-scale capsules and graspers. We also use this concept in an antagonistic manner, where reversing the semi-hard magnet's polarity precisely controls whether the two magnets attract or repel each other, enabling components like untethered valves for in-vivo devices. |
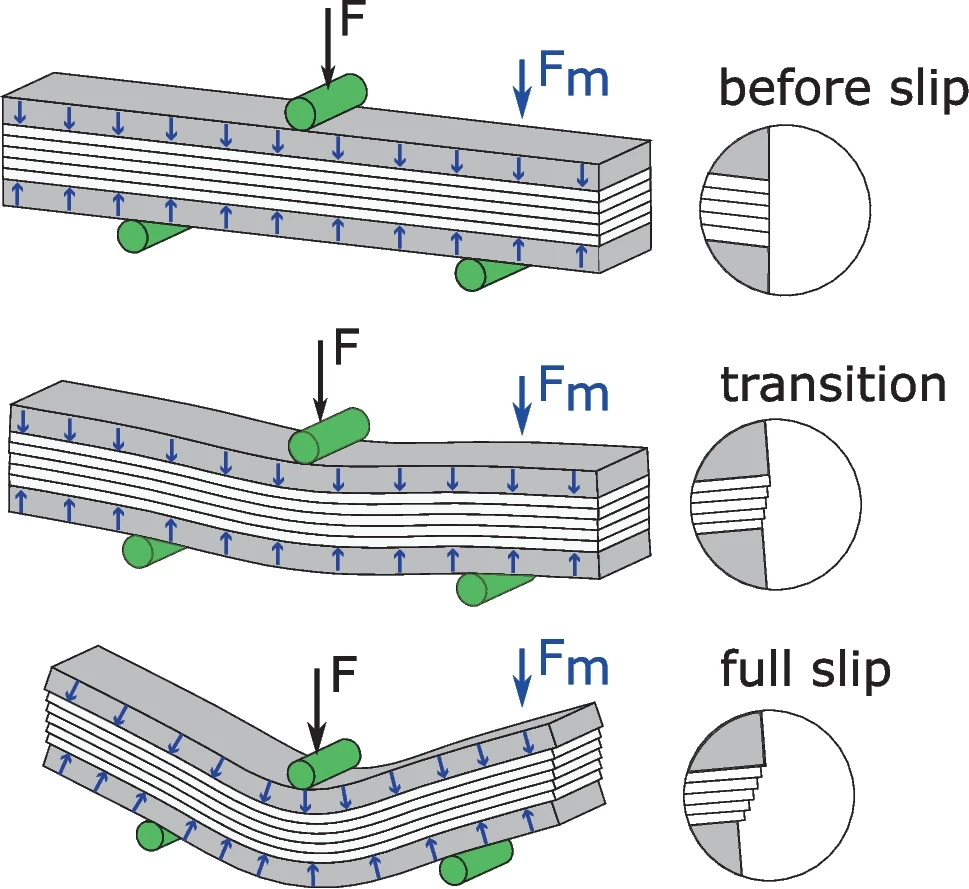
Variable stiffnessThis study explores a hybrid method to solve the significant challenge of variable and controllable stiffness in soft robotics, addressing the need for robots to be both compliant for adaptation and rigid for task execution. The proposed solution innovatively combines two techniques: jamming, which increases stiffness via friction between elements like layers or fibers, and the use of magnetorheological elastomers (MREs), which are smart materials that intrinsically stiffen (the "MR effect") when exposed to a magnetic field. Unlike traditional pneumatic (vacuum) jamming, this research aims to use magnetic jamming to generate the necessary frictional force. The goal is to use a single magnetic actuation to simultaneously trigger this jamming force and activate the MR effect, thereby enhancing the total stiffness variation in soft robotic systems. |
 |
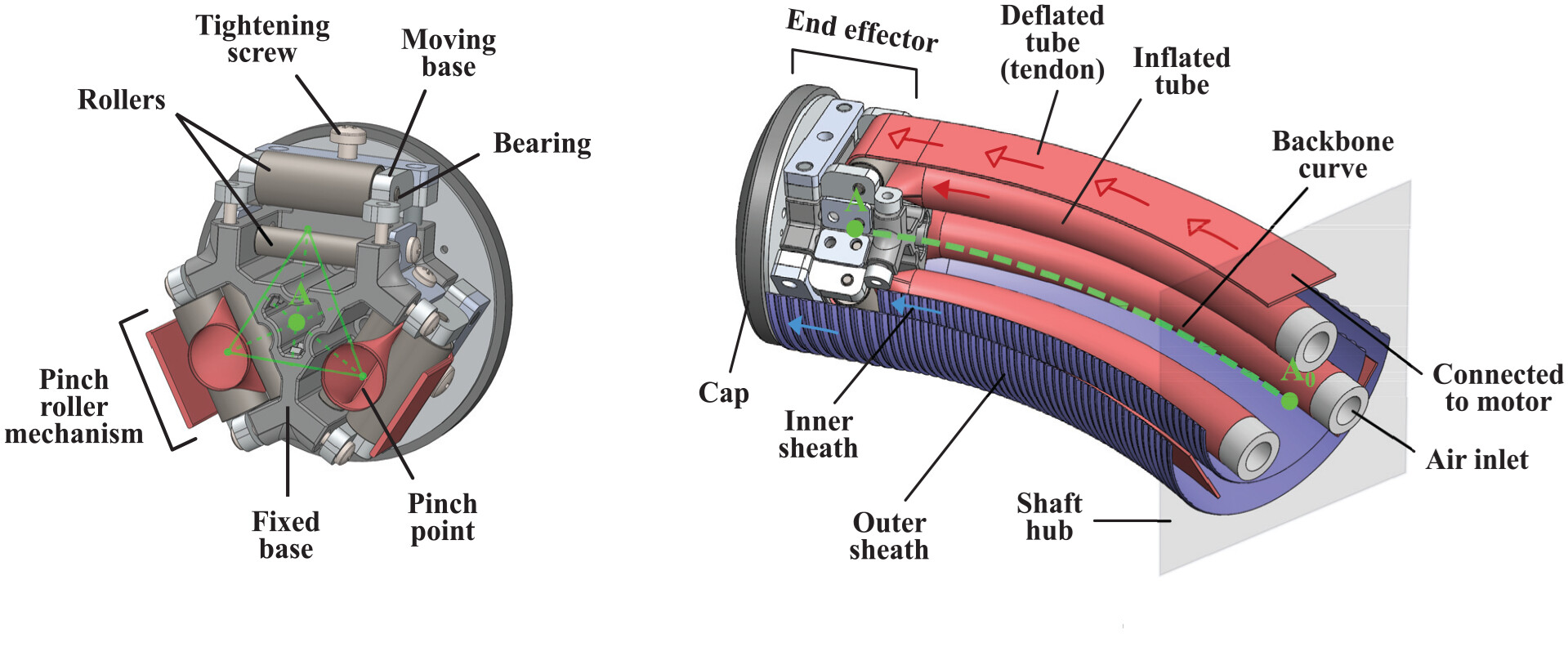 |
Robotic Colonoscopy (ROBOCOL)ROBOCOL is a novel growing soft robot, designed to overcome the significant drawbacks of conventional colonoscopy, such as patient pain, risk of perforation, and musculoskeletal injuries to operators. The proposed system is a soft continuum robot that propels itself by "growing from the tip", an actuation method that pulls the robot's body to reduce looping and minimize reaction forces on the colon wall. This locomotion is achieved via a novel Pinch Roller Actuator (PRA) mechanism that independently controls three pressurized pneumatic tubings to provide 3-DOF steering. The study established both a kinematic model based on constant curvature and a quasi-static model to correct for the soft body's deformation underload. Multiple prototypes (1D, 2D, and 3D large-scale) were fabricated and tested in in-vitro maze-like environments. These validation tests successfully proved the concept, demonstrating controllable navigation and confirming that the robot's wall interaction is minimized. |
Join Us
If you're interested in cutting-edge robotics and want to work on projects that have real-world impact, consider joining our team. Our research combines creativity, engineering, and hands-on experiments, offering a great opportunity to learn and grow in this exciting field.

There is currently no content classified with this term.
