Medical Robotics
Medical Robotics
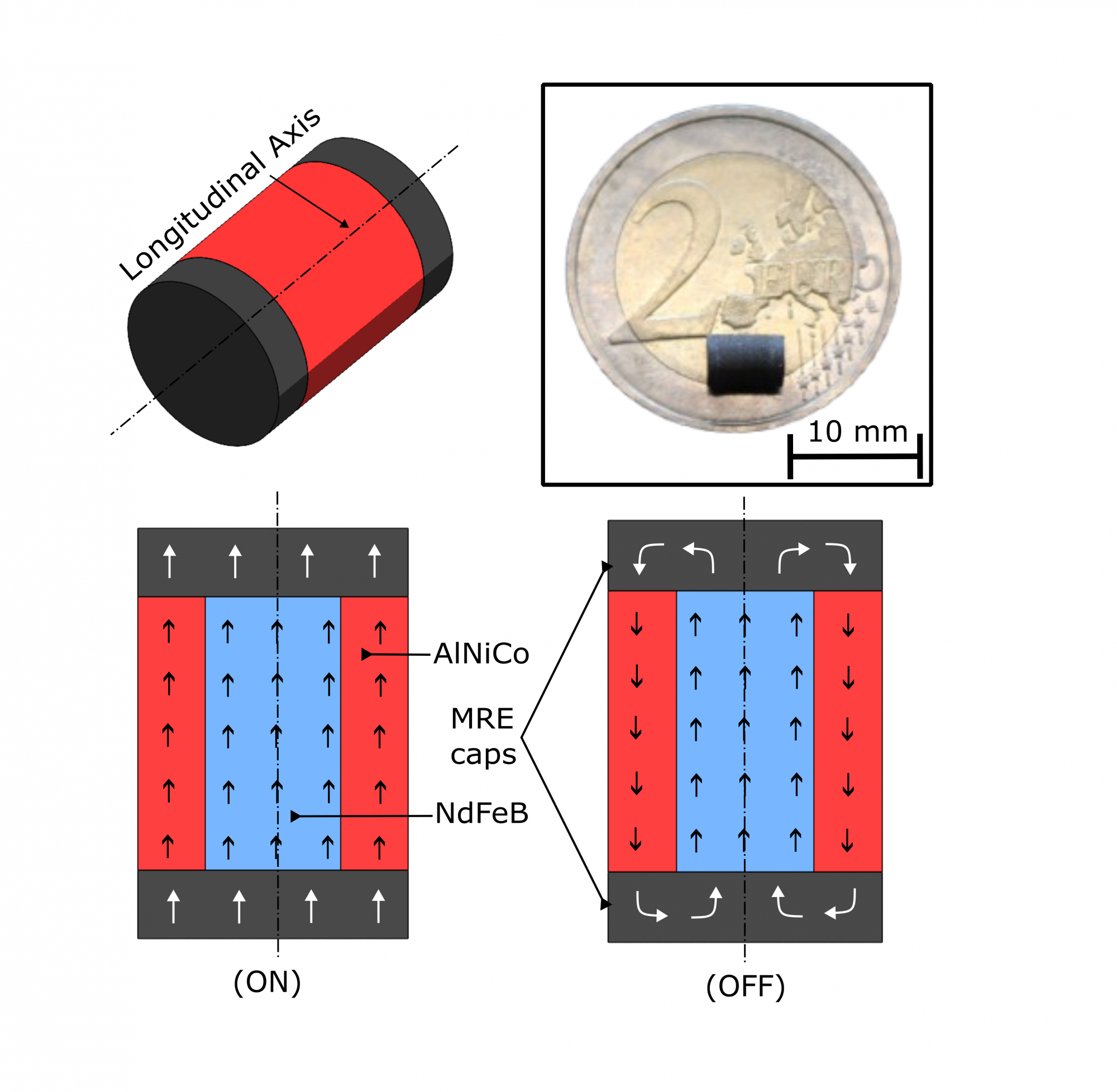
Magnetic Soft CapsulesMagnetic soft robots offer features such as wireless operation, compact size, and reconfigurability that may be promising for robotic healthcare applications. The present study introduces a magnetically actuated soft capsule, which may be employed for cargo delivery. The capsule is composed of two elastomeric open chambers that are attached to two flexible magnetic rings (an AlNiCo ring and a NdFeB ring). When the magnetization directions of the rings are aligned, the chambers are attracted to one another, resulting in the closure of the capsule. The application of a brief, low-energy magnetic field pulse results in the reversal of the AlNiCo ring’s magnetization, which in turn causes the capsule to open. The capsule is made of fully flexible components and can be controlled remotely via an external magnetic field during applications such as targeted cargo delivery in the colon. |
 |
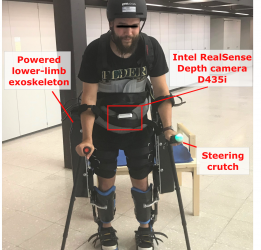 |
Wearable RoboticsThe daily use of advanced wearable robotic devices for the assistance of people with locomotor disabilities is still facing clear limitations in usability and acceptance (e.g., cost, complexity, and inability to maintain balance). In most devices, the correct selection and initiation of pre-defined functions and activities (e.g., walking and stair ascent-descent) rely on the user’s input and constant interpretation of the environment, which results in a substantial cognitive workload. In this study, a novel environment recognition and parameterization system that uses depth camera images is proposed as a potential assistant in the control of powered lower-limb exoskeletons. In conclusion, an assistive environment recognition system shows potential to reduce the cognitive workload on the user, and thereby positively influence device usability. |
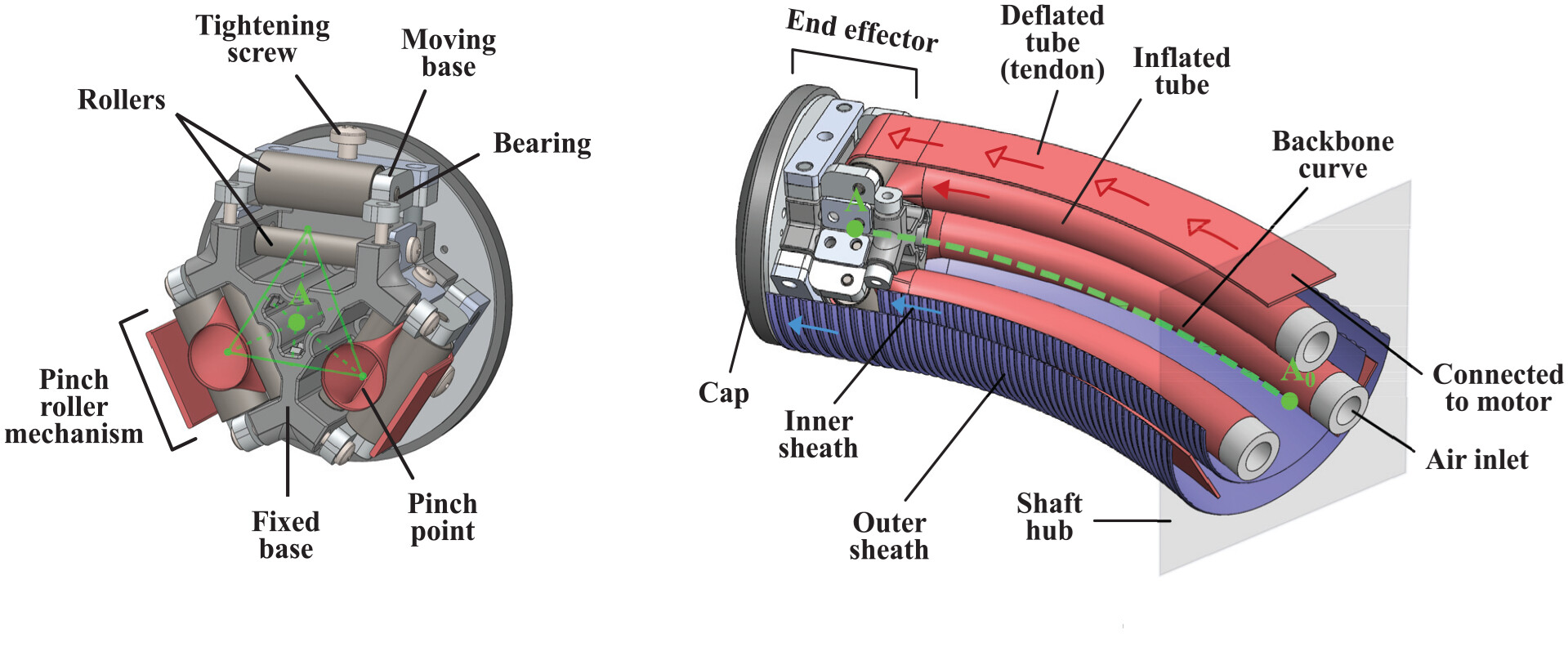
Robotic Colonoscopy (ROBOCOL)ROBOCOL is a novel growing soft robot, designed to overcome the significant drawbacks of conventional colonoscopy, such as patient pain, risk of perforation, and musculoskeletal injuries to operators. The proposed system is a soft continuum robot that propels itself by "growing from the tip", an actuation method that pulls the robot's body to reduce looping and minimize reaction forces on the colon wall. This locomotion is achieved via a novel Pinch Roller Actuator (PRA) mechanism that independently controls three pressurized pneumatic tubings to provide 3-DOF steering. The study established both a kinematic model based on constant curvature and a quasi-static model to correct for the soft body's deformation underload. Multiple prototypes (1D, 2D, and 3D large-scale) were fabricated and tested in in-vitro maze-like environments. These validation tests successfully proved the concept, demonstrating controllable navigation and confirming that the robot's wall interaction is minimized. |
 |
There is currently no content classified with this term.
