Industrial Robotics
Projects
Ongoing Projects
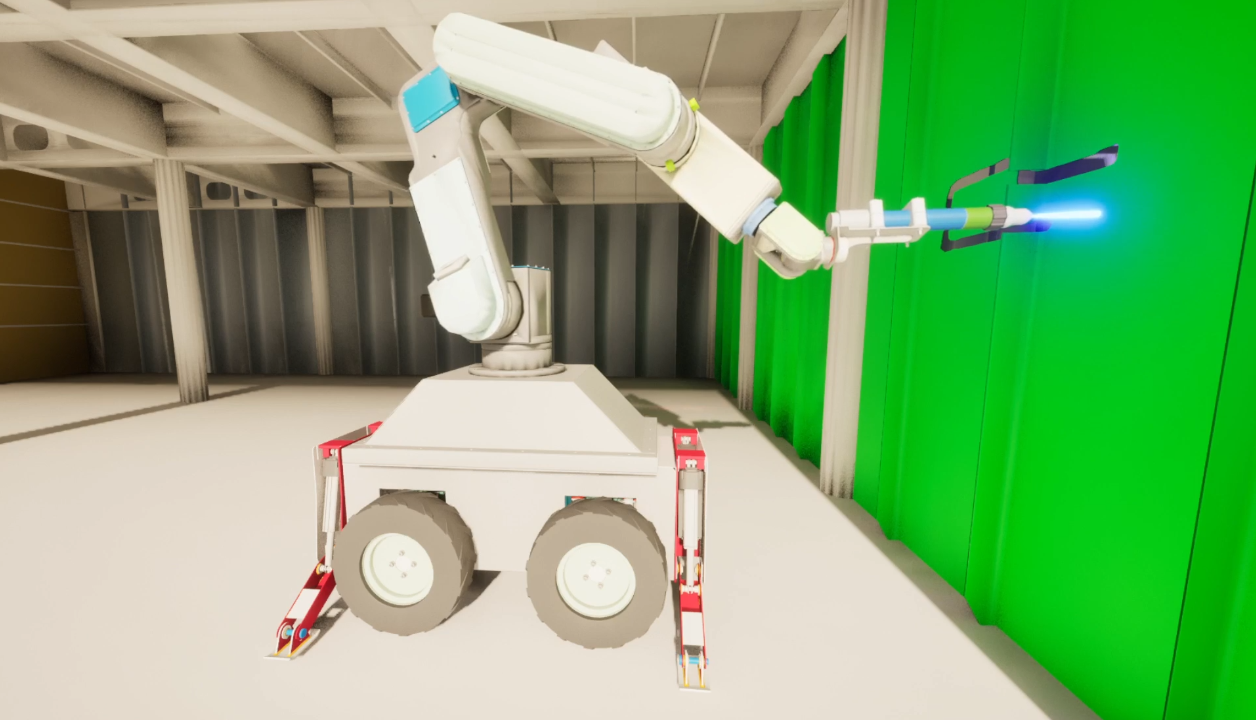 |
Safe, Healthy and Environmental Ship Recycling (SHEREC)Ship recycling, involving the dismantling of ships, poses significant risks, with high levels of fatalities, injuries and work-related diseases despite international regulations. The sector also faces challenges related to inadequate waste management, leading to the contamination of coastal areas with toxic waste. In response to these issues, the EU-funded SHEREC project will introduce innovative robotics, data and AI systems to the ship recycling industry to set new standards for worker safety and environmental responsibility. The project envisions the use of an AI-powered drone to locate hazardous materials, while a digital twin and AI-based planning will automate the ship’s recycling plan. In addition, two mobile robotic systems will robotise cutting and paint removal processes. Funded by the European Union under the SHEREC project (Grant 101136056). Views and opinions expressed are however those of the author(s) only and do not necessarily reflect those of the European Union. Neither the European Union nor the granting authority can be held responsible for them. |
Finished Projects
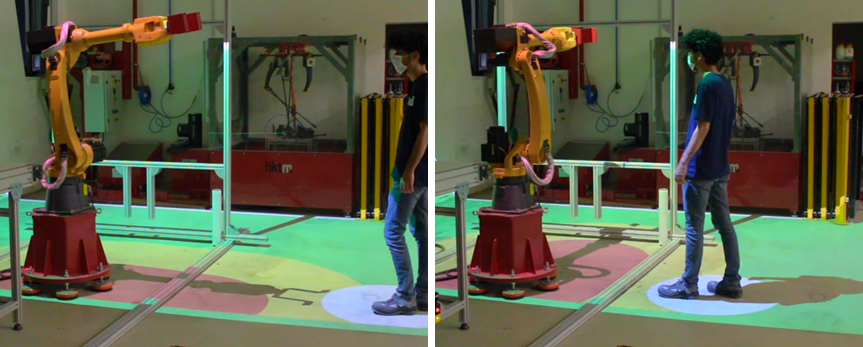
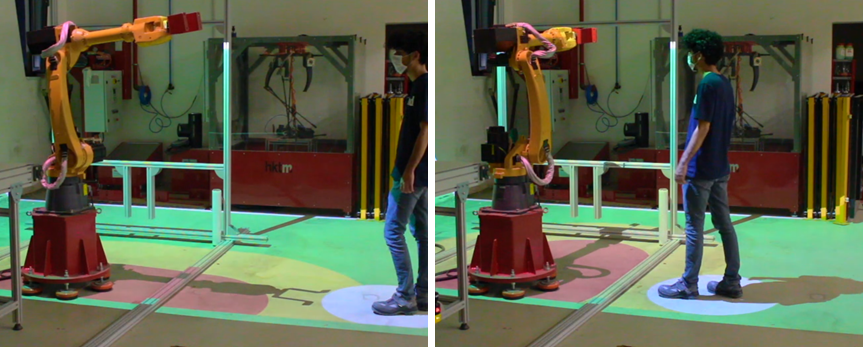
Development and Implementation of a Collaborative Workspace for Industrial Robots Utilizing a Practical Path Adaptation Algorithm and Augmented Reality (2022)This project introduces a new collaborative workspace concept for industrial robots to enhance human safety without enclosing fences. It features a path adaptation algorithm that allows the robot to react dynamically to human proximity and an augmented reality warning system that visually alerts workers through a projector or headset. The system enables the robot to slow down, avoid, or stop based on distance, reducing downtime while maintaining safety. Tests show that this approach improves collaboration and situational awareness, offering a practical and scalable way to retrofit conventional robots with collaborative capabilities. |
|
 |
An adjustable robotic tool for nut running operations (2022)This study presents a multifunctional robotic tool for performing complex assembly operations involving adjustable refrigerator feet. The tool integrates three subsystems: a gripper for handling parts of varying shapes, a nut runner for precise fastening, and a vision system with a depth camera for positioning and verification. Experiments show that the tool provides repeatable and accurate performance when mounted on an industrial manipulator, enhancing automation in tasks that previously required manual intervention. |
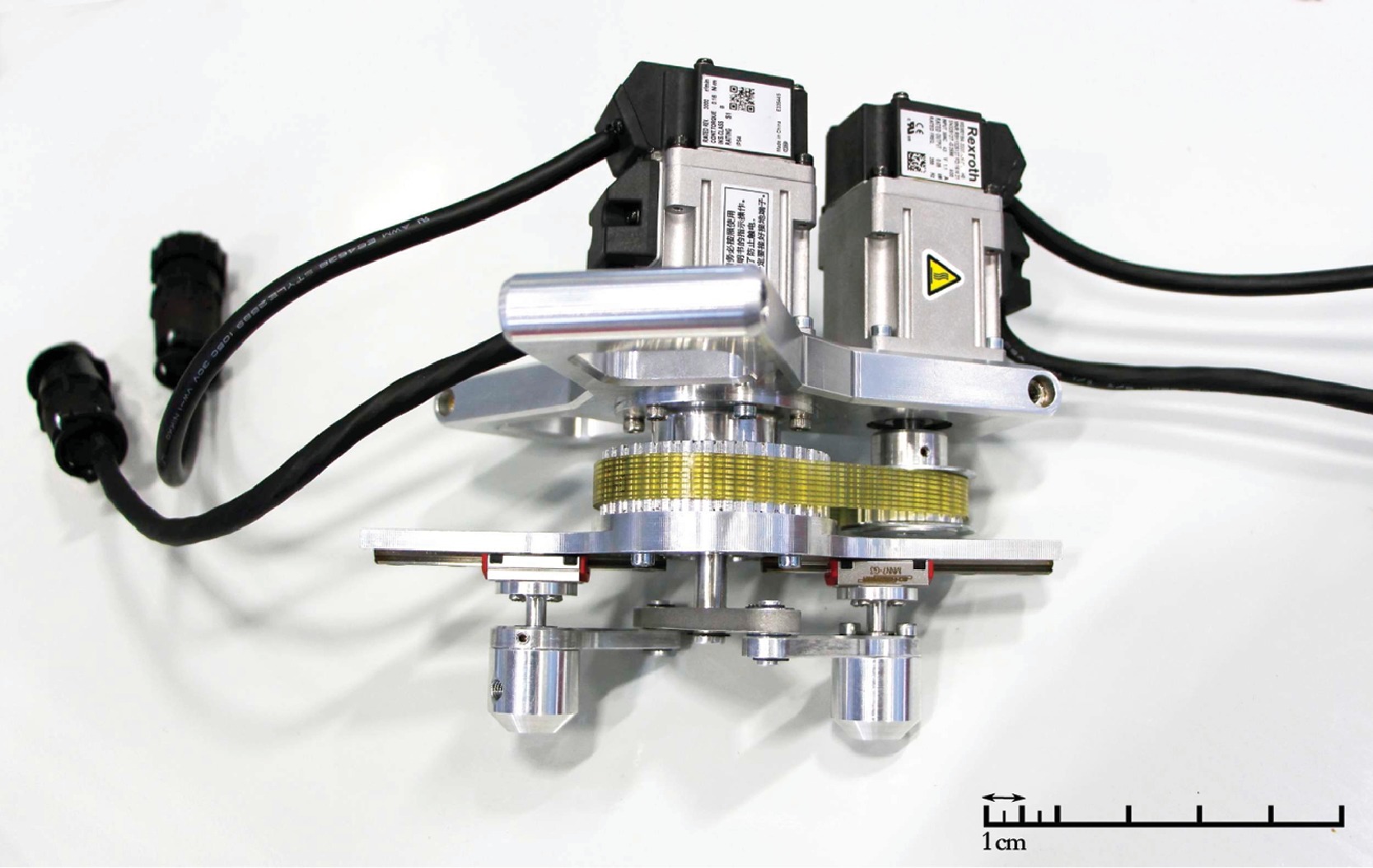
A robotic gripper for picking up two objects simultaneously (2017)This project develops a novel two-degree-of-freedom gripper for pick-and-place operations where object flow is faster than typical robot cycles. The design enables the robot to grasp two objects simultaneously, reducing cycle time and energy consumption. Integrated with a Delta-type manipulator, the gripper improves performance in high-speed industrial scenarios with randomly arriving objects. Tests confirm enhanced throughput and efficiency compared to conventional single-grip setups. |
 |
Join Us
If you're interested in building the future of industrial automation and robotics, consider joining our team. Our research combines cutting-edge technology with practical applications, offering an exciting opportunity to work on projects that make a real difference in industry.
There is currently no content classified with this term.
