European Commission REA
FP7 Marie Curie CIG
SENSPRO

Project No: 631830
Project Acronym: SENSPRO
Project Full Name: Sensory Feedback for Improved Prosthesis Control
Start date of project: 01/04/2014
Researcher: Assist. Prof. Evren Samur, Boğaziçi University
Project coordinator: Prof. Günay Anlaş, Boğaziçi University
Abstract
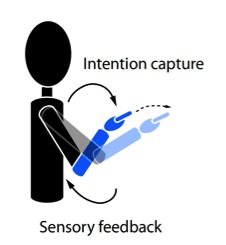
Functional substitution of a lost limb is necessary for persons with an amputation to perform daily life explorations and manipulations in their environment. In the case of a hand loss, affective reasons gain importance as amputees often indicate the desire to feel the warmth of a loved one’s touch. These considerations provide two key characteristics of successful prosthetics: (1) intuitive control of prostheses and (2) providing physiologically appropriate feedback to the user. Although there has been significant progress on the prosthesis control and sensory feedback, the ability to supply physiologically appropriate proprioceptive feedback remains elusive. This project seeks for sensory feedback for improved prosthesis control. First, relative contributions of feedback modalities (vision, proprioception and artificial proprioception) on coordinated manipulations will be investigated. Then, based on these results, new sensory feedback systems will be developed for persons with an upper-limb amputation.
Objectives and Rationale
The ultimate goal of this study is to improve prosthesis control with appropriate sensory feedback. Towards this goal, the objectives of this study are to
Identify relative contributions of the sensory feedback modalities (vision, proprioception, artificial proprioception) on coordinated manipulations.
Develop and evaluate sensory feedback systems for persons with an upper-limb amputation.
The rationale underlying this research is that identifying the role of sensory feedback on human-machine interaction control and demonstrating whether its sensory substitution has any benefit on movement control will provide ways to improve prosthesis control. The central hypothesis of this study is that coordinated movements or manipulations in multi degrees of freedom (DOF) require physiologically appropriate proprioceptive feedback. It is hypothesized that sensory substitution, unless modality-matched and incorporated, has little contribution on the control of human-machine interfaces.
The results to be obtained by pursuing these objectives are expected to have valuable contributions to the EU community at different fronts. On the scientific front, findings are expected to advance the general understanding about human sensory feedback system and contribute to the European scientific excellence in neuroscience. Moreover, the results will develop several technologies and devices for prosthesis users. This way it is expected that the results of this research will contribute to the health and wellbeing of our society.
Research Methodology
It is planned to reach the objectives of this project by pursuing the following two work packages (WP):
WP1. Examining the sensory feedback modalities
Develop a 3-DOF haptic interface enabling impedance and admittance control.
Test whether sensory substitution of proprioception contributes to successful manipulation of unstable objects in multi-DOF.
Identify the role of sensory incorporation on movement control.
Identify the conditions under which internal dynamic models are developed through sensory substitution of proprioception.
WP2. Developing the sensory feedback systems
Design and evaluate a tactile interface displaying contact information
Design and evaluate a tactile interface displaying position/orientation of prosthetic hand
Design and evaluate a haptic interface providing appropriate sensory feedback for coordinated manipulations

Publications